UM0002 JxServo Studio 控制指令使用教程
| 项目 | 信息 |
|---|---|
| 文档编号 | UM0002 |
| 文档版本 | Rev. 1.0 |
| 适用产品 | JxServo Studio |
| 语言 | 简体中文 |
| 最后更新 | 2026-06-05 |
适用范围
本文档用于说明 JxServo Studio“命令列表”中的基础控制指令和扩展调试指令,适用于现场调试、出厂检查、售后定位和研发联调等场景。
执行本文档中的指令前,请先完成设备连接、命令列表读取和必要的数据波形配置。连接和波形查看流程请参考 UM0001 JxServo Studio 连接与波形查看教程。
不同产品型号和固件版本开放的命令可能不同,实际使用时应以当前设备返回的命令列表为准。
1. 基本控制指令
本章说明“命令列表”中默认 TEST 组的基础指令,主要覆盖示波采集、伺服使能、基础电流/速度控制、S 曲线定位、MIT 阻尼保持和机械零位设置。
执行控制指令前,请先确认设备已经连接成功,并且命令列表已经读取完成。涉及电流、速度、位置或 MIT 控制的指令会驱动电机动作,执行前应确认设备固定可靠、运动空间安全、急停或断电手段可用。
操作安全
首次调试时建议使用较小的电流、速度和位移目标,并观察波形、日志和设备状态。设备处于故障状态时,应先排查并清除故障,再执行控制类指令。
下列示例仅用于说明上位机参数填写方式。实际调试时,请根据产品规格、负载状态和现场安全条件调整数值。
1.1 启动示波采集
“启动示波采集”用于打开设备侧遥测帧发送。执行后,上位机会持续接收所选帧并显示波形数据。
▸ 参数
P0、P1、P2:需要开启的帧号,取值为0到8;1到8分别对应F1到F8,0表示该位置为空。P3:统一分频,类型为整数;0表示不分频,非0表示按该值分频发送。
▸ 说明
执行成功后,设备只发送 P0 到 P2 中选择的帧,并对已开启帧使用同一个分频值;日志会提示波形控制已更新。该指令只影响波形帧发送,不改变电机控制状态。
▸ 提示
默认情况下,连接上位机后软件会自动开启 F2 帧,用于显示设备基本信息和常用状态。只有需要额外观察其他帧数据,或需要调整分频时,才需要手动执行该指令。
▸ 示例
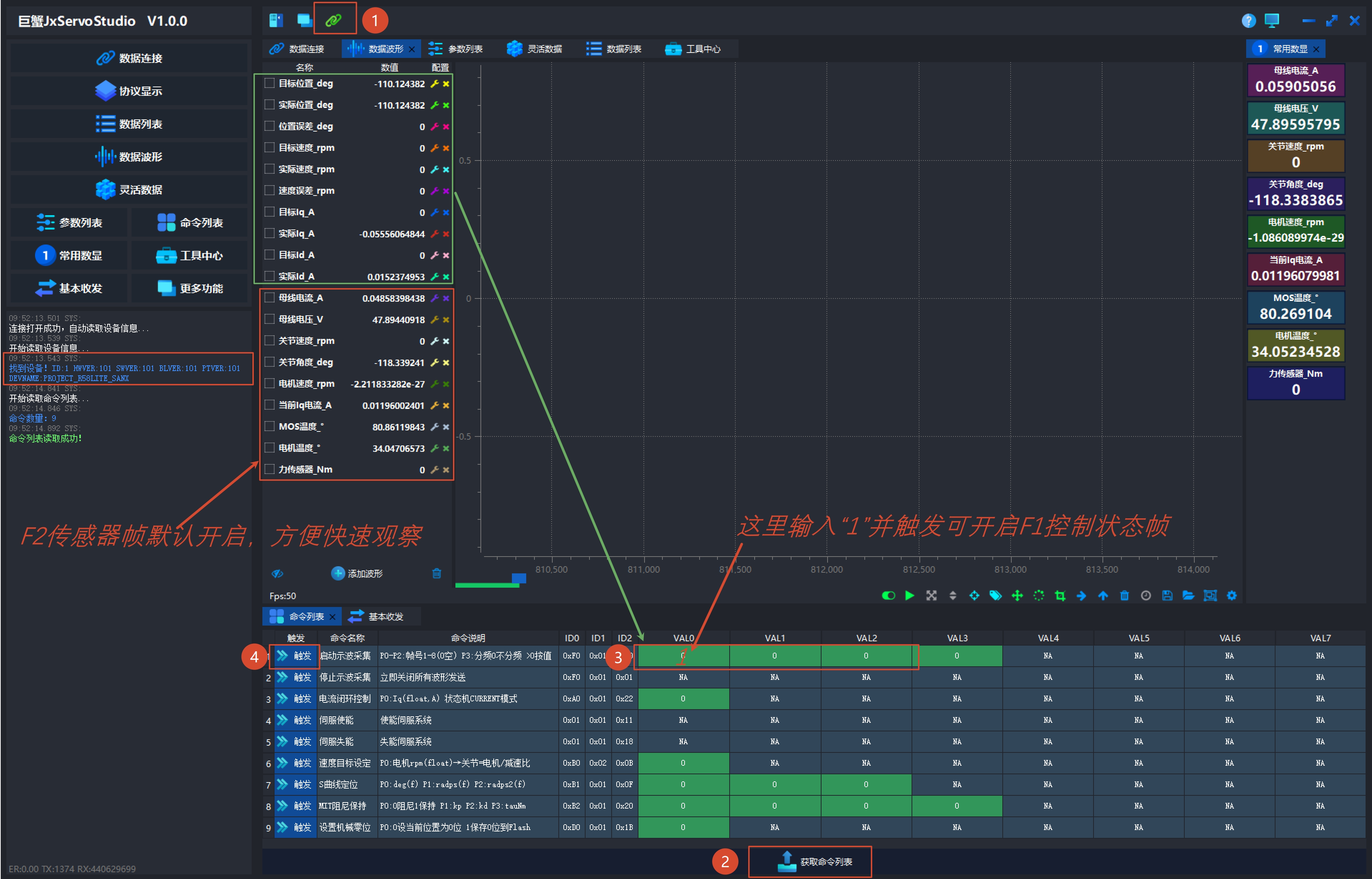
P0=1、P1=2、P2=0、P3=0:开启F1和F2两组波形帧,第三个帧号留空,并保持不分频发送。
1.2 停止示波采集
“停止示波采集”用于关闭全部波形帧发送。执行后,上位机不再接收新的 F1 到 F8 波形数据。
▸ 参数
该指令无需填写参数。
▸ 说明
执行后只停止波形数据发送,不会停止电机运动,也不会删除上位机中已经添加的波形列表。需要停止电机时,应使用伺服失能或对应控制指令。
▸ 示例
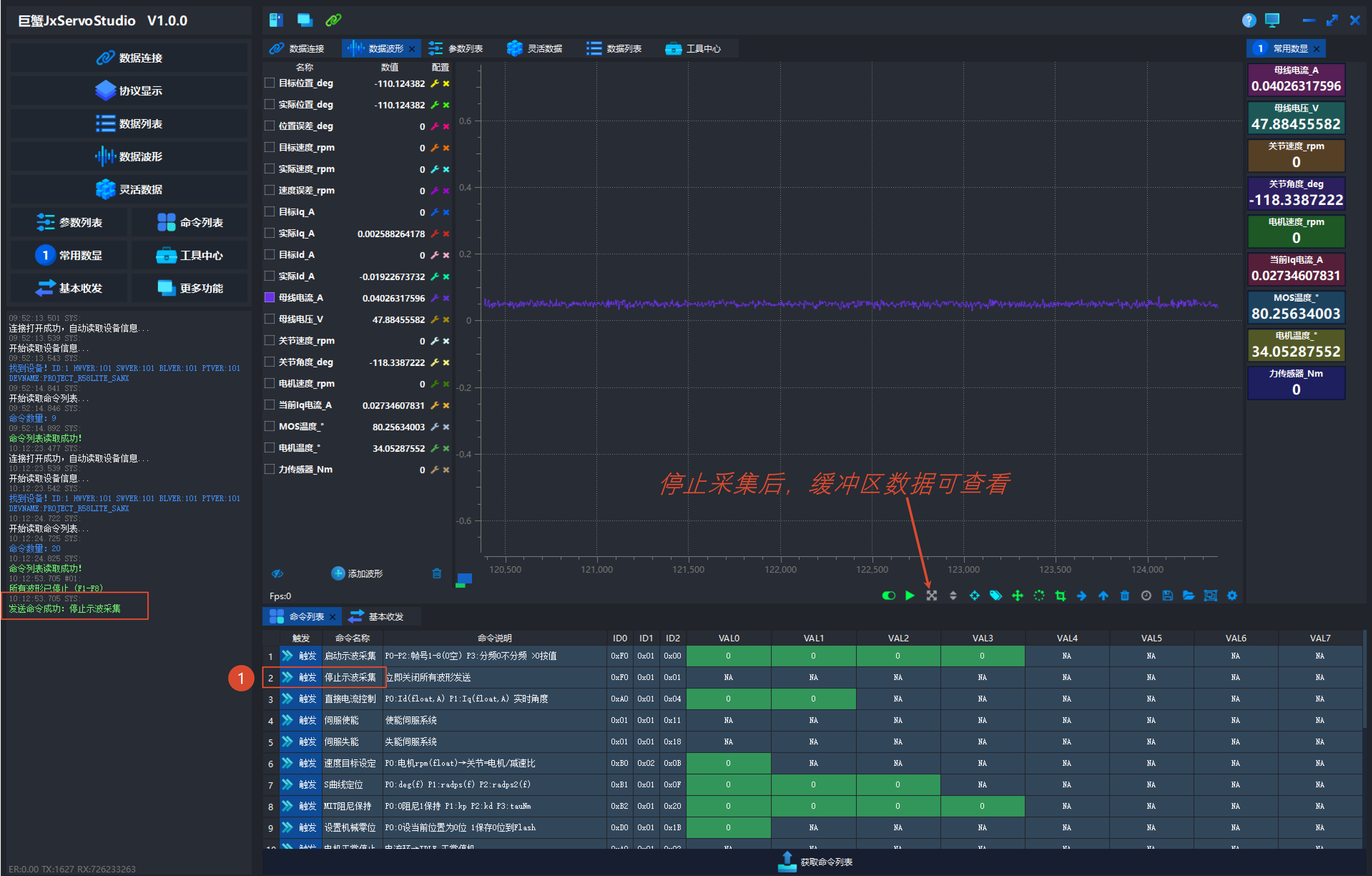
- 不填写任何参数,直接点击该命令的“触发”按钮,关闭当前所有
F1到F8波形帧发送。
1.3 电流闭环控制
“电流闭环控制”用于下发 Iq 电流目标。执行后,设备会进入电流闭环控制状态并按目标电流输出。
▸ 参数
P0:Iq目标电流,类型为float,单位为A。
▸ 说明
执行时,设备会检查伺服状态和故障状态。如果伺服处于关闭状态,设备会尝试自动使能;如果设备处于故障状态,命令会被拒绝,应先清除故障或复位。执行成功后,目标电流和实际电流可通过波形观察。
▸ 提示
首次调试建议从更小电流开始,并确认电机方向和负载状态。部分模组或带载机构静摩擦较大时,过小电流可能无法带动电机,可在确认安全的前提下逐步增大 P0。
▸ 示例
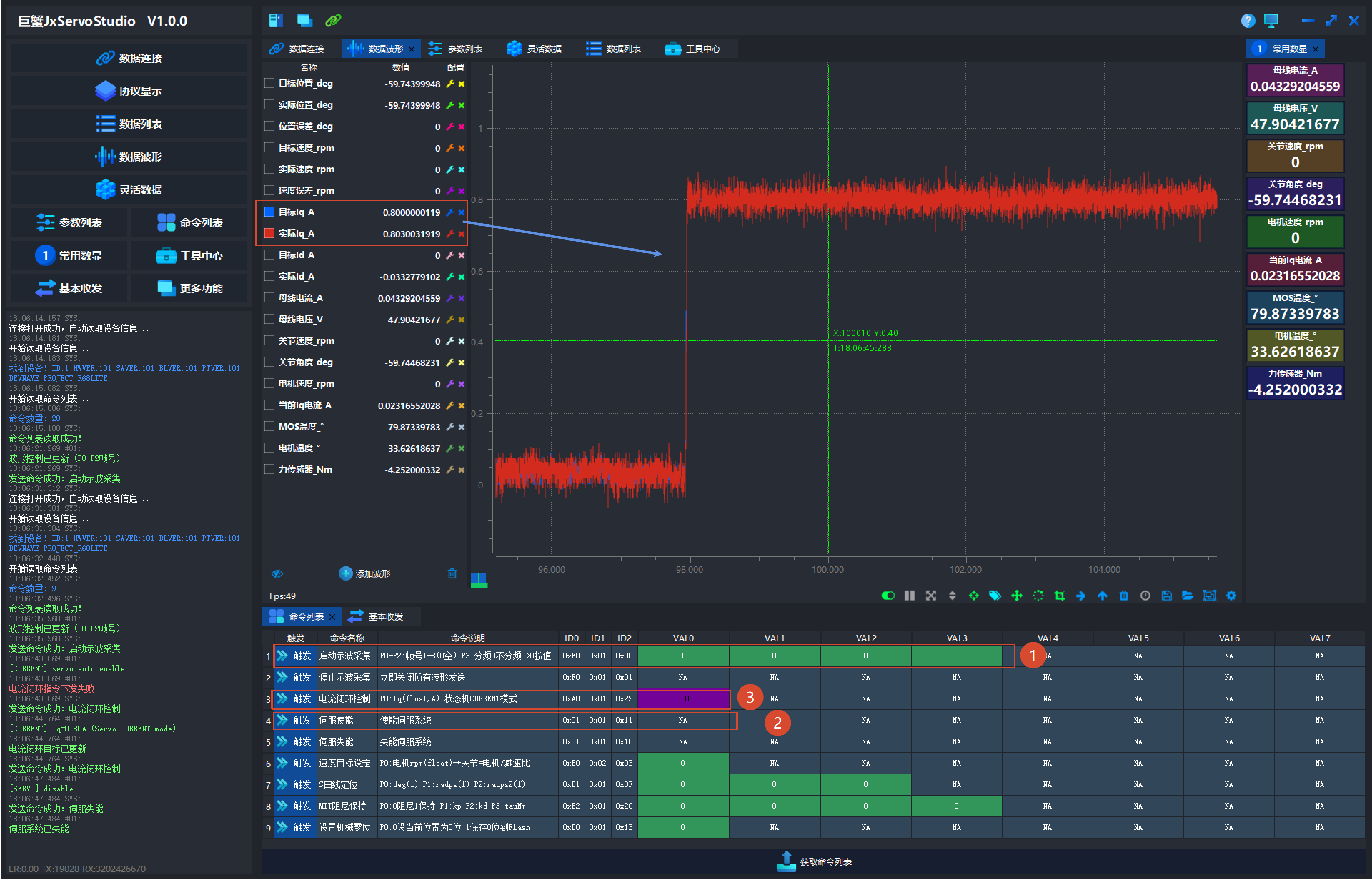
- 确认设备已使能并开启电流相关波形后,填写
P0=0.8,点击“触发”,下发Iq=0.8 A的电流闭环目标。
1.4 伺服使能
“伺服使能”用于将设备切换到可执行控制指令的伺服保持状态。使能成功后,设备会以当前关节位置作为目标位置进入闭环保持。
▸ 参数
该指令无需填写参数。
▸ 说明
执行时,设备会检查初始化状态、编码器状态以及当前故障/保护状态。若设备处于故障、保护、编码器异常或未初始化状态,使能会被拒绝,应先排查并清除异常。使能成功后,无抱闸设备通常直接进入保持状态;带抱闸设备会先完成松闸和上电准备,再进入保持状态。
▸ 提示
使能成功后,设备通常不会主动移动到新位置,而是在当前位置附近保持。可通过日志中的 [SERVO] enable 或“伺服系统已使能”等提示确认执行结果。
▸ 示例
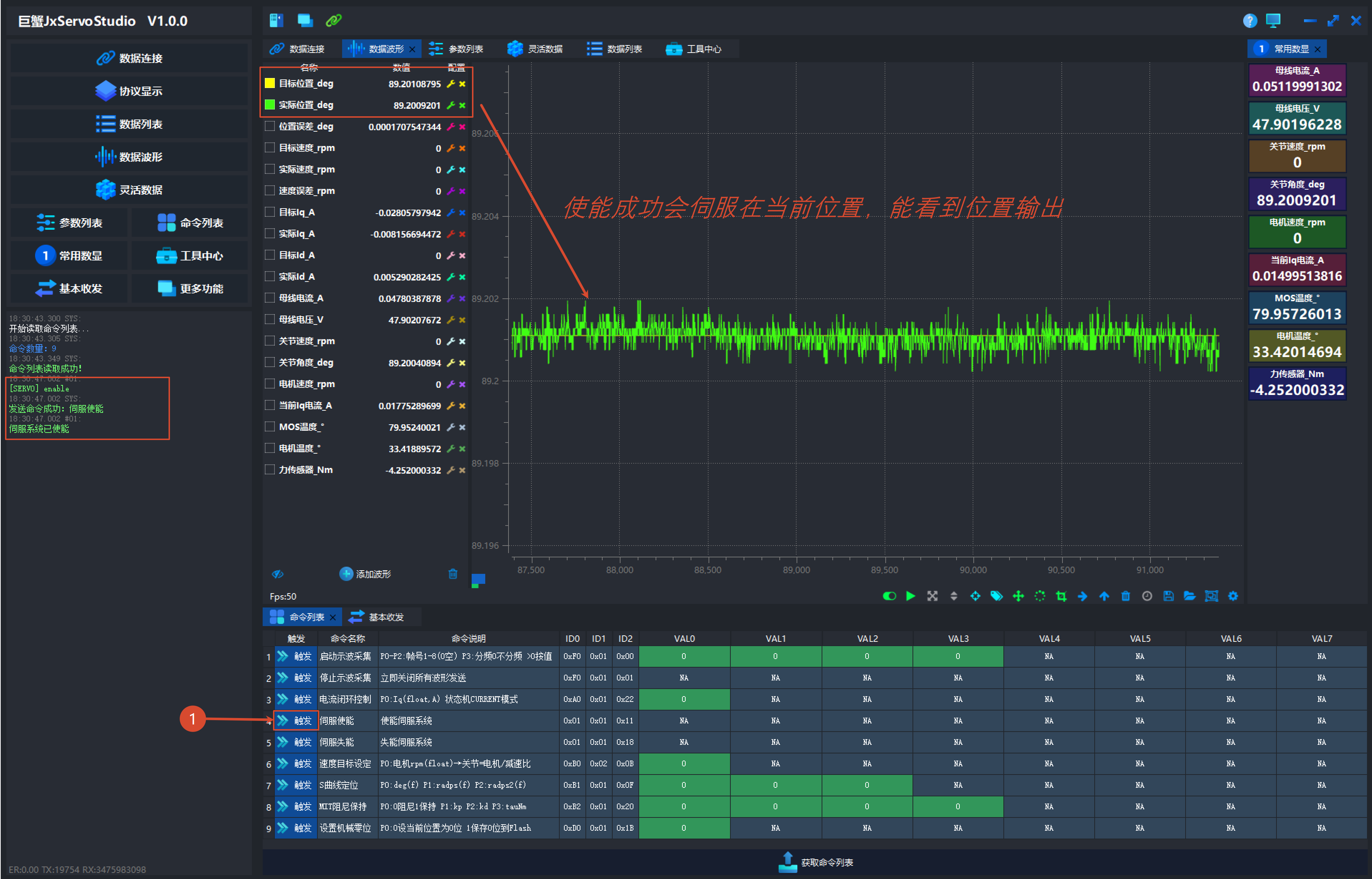
- 不填写任何参数,确认设备处于安全位置后点击“触发”,使能伺服系统。
1.5 伺服失能
“伺服失能”用于关闭伺服输出并退出当前控制状态。
▸ 参数
该指令无需填写参数。
▸ 说明
执行后,设备会停止当前伺服控制。结束测试或断开设备前,建议先执行伺服失能。
▸ 示例
- 不填写任何参数,点击“触发”,关闭伺服输出并结束当前控制状态。
1.6 速度目标设定
“速度目标设定”用于下发速度环目标。执行后,设备会按目标速度进入速度控制。
▸ 参数
P0:目标速度,类型为float,单位为电机侧rpm。
▸ 说明
该参数按电机侧速度填写即可。若伺服处于关闭状态,设备会尝试自动使能;若设备处于故障状态,命令会被拒绝。输入速度过小并低于当前速度模式死区时,日志会提示本次命令可能被视为 0。
▸ 示例
P0=10.0:下发电机侧10 rpm的速度目标。
1.7 S曲线定位
“S曲线定位”用于按目标位置、最大速度和加速度启动一次平滑定位动作。执行后,设备会规划并执行一段 S 曲线运动。
▸ 参数
P0:目标角度,类型为float,单位为deg。P1:最大速度,类型为float,单位为rad/s。P2:加速度,类型为float,单位为rad/s^2。
▸ 说明
设备会检查 P1 和 P2 是否为有效正数。速度或加速度小于等于 0 时,命令会被判定为参数非法。执行前应确认目标角度、速度和加速度均在机构允许范围内。
▸ 提示
当前默认 TEST 组不暴露“位置设定(CSP)”直通指令。上位机执行命令时只发送一次目标值,直通 CSP 容易造成目标阶跃;需要位置运动时,优先使用“S曲线定位”。
▸ 示例
P0=5.0、P1=0.5、P2=1.0:以0.5 rad/s最大速度、1.0 rad/s^2加速度,平滑移动到5 deg目标位置。
1.8 MIT阻尼保持
“MIT阻尼保持”用于进入 MIT 模式下的纯阻尼或柔顺保持控制。执行后,设备会按所选模式更新 MIT 控制目标。
▸ 参数
P0:模式,0表示纯阻尼,1表示柔顺保持。P1:kp,类型为float,单位为Nm/rad。P2:kd,类型为float,单位为Nm*s/rad。P3:前馈力矩tau_ff,类型为float,单位为Nm。
▸ 说明
执行时,设备会检查故障状态,并在伺服关闭时尝试自动使能。kp 和 kd 必须大于等于 0。当 P0=0 时,设备进入纯阻尼;当 P0=1 时,设备使用当前位置作为保持位置并进入柔顺保持。
▸ 示例
- 纯阻尼:
P0=0、P1=0、P2=0.2、P3=0,进入 MIT 纯阻尼模式。 - 柔顺保持:
P0=1、P1=2.0、P2=0.2、P3=0,以当前位置作为保持位置进入柔顺保持。
1.9 设置机械零位
“设置机械零位”用于设置或保存关节机械零位。执行后,设备会立即更新当前零位或提交零位保存请求。
▸ 参数
P0=0:将当前位置设置为机械零位。该操作会立即在 RAM 中生效,不会写入 Flash。P0=1:将当前生效的机械零位提交保存到 Flash。实际写入由后台参数任务在安全上下文中完成。
▸ 说明
P0=0 会改变当前位置坐标系,执行前请确认关节已经处于正确的机械零位位置。P0=1 只提交保存作业,如果当前设备仍处于使能状态,保存可能需要等待进入安全状态后完成。
▸ 提示
建议先执行 P0=0 并确认当前位置显示正确,再执行 P0=1 保存;保存期间不要断电。
▸ 示例
P0=0:将当前关节位置立即设置为机械零位,仅在 RAM 中生效。P0=1:将当前生效的机械零位提交保存到 Flash,等待后台安全写入完成。
2. 扩展调试指令
本章说明 DEBUG 组中额外开放的控制和调试指令。DEBUG 组是在 TEST 组基础上追加的命令集合,第 1 章已经介绍过的启动/停止示波采集、伺服使能/失能、速度目标、S 曲线定位、MIT 阻尼保持和机械零位设置,本章不再重复说明。
首次连接设备并读取命令列表时,软件默认显示 TEST 组基础指令。需要进入扩展调试指令时,可再次点击底部“获取命令列表”,让设备重新返回当前可见命令组。
调试安全
扩展调试指令主要用于研发、产测和现场问题定位,部分指令会绕过常规运动规划或直接作用于电流环。执行前应确认设备固定可靠、运动范围安全,并从较小参数开始测试。
2.1 直接电流控制
“直接电流控制”用于直接下发 Id / Iq 电流目标。执行后,设备会使用实时角度进行底层 FOC 电流控制。
▸ 参数
P0:Id目标电流,类型为float,单位为A。P1:Iq目标电流,类型为float,单位为A。
▸ 说明
该指令属于底层电流环调试入口,不经过第 1 章的伺服状态机电流模式。执行后电流目标会直接作用到电流环,适合研发、产测或问题定位场景。
▸ 提示
首次使用时应保持较小电流,并确认电机方向、负载和散热条件。
▸ 示例
P0=0.0、P1=0.1:保持Id=0 A,下发Iq=0.1 A的直接电流目标。
2.2 电机正常停止
“电机正常停止”用于请求电流环进入安全停止或空闲状态。执行后,设备会停止当前电流环输出。
▸ 参数
该指令无需填写参数。
▸ 说明
执行后,设备会请求电流环停止运行,并在日志中提示电机已停止。该指令主要用于扩展调试场景下的正常停机。
▸ 示例
- 不填写任何参数,点击“触发”,请求电机正常停止。
2.3 电机紧急制动
“电机紧急制动”用于请求电流环进入故障状态。执行后,设备会以紧急方式终止当前电流环输出。
▸ 参数
该指令无需填写参数。
▸ 说明
该指令比正常停止更强硬,适合异常调试场景下快速终止当前电流环输出。执行后通常需要重新处理故障状态,才能继续使能或执行控制指令。
▸ 提示
紧急制动不应作为常规停机步骤使用;正常结束测试时优先使用“电机正常停止”或“伺服失能”。
▸ 示例
- 不填写任何参数,点击“触发”,请求电机紧急制动。
2.4 开环电流控制
“开环电流控制”用于按指定电流、机械速度和初始电角度启动开环电流调试。执行后,设备会按开环方式输出电流。
▸ 参数
P0:Id目标电流,类型为float,单位为A。P1:Iq目标电流,类型为float,单位为A。P2:机械速度,类型为float,单位为rpm。P3:初始电角度,类型为float,单位为deg。
▸ 说明
该指令用于开环调试,不依赖编码器实时角度闭环。执行前应确认设备固定可靠、运动范围安全,并使用符合产品规格的电流和速度。
▸ 提示
首次使用时应使用较小电流和速度,避免设备产生不可预期动作。
▸ 示例
P0=0.0、P1=0.1、P2=0.0、P3=0.0:以较小Iq电流、零机械速度和0 deg初始电角度启动开环电流调试。
2.5 开环电压控制
“开环电压控制”用于按指定 Vd / Vq、机械速度和初始电角度启动开环电压调试。执行后,设备会按开环方式输出电压。
▸ 参数
P0:Vd目标电压,类型为float,单位为V。P1:Vq目标电压,类型为float,单位为V。P2:机械速度,类型为float,单位为rpm。P3:初始电角度,类型为float,单位为deg。
▸ 说明
如果当前已经处于开环电压调试状态,重复执行该指令会更新开环电压参数。执行前应确认设备固定可靠、运动范围安全,并使用符合产品规格的电压和速度。
▸ 提示
首次使用时应从较小电压开始,观察电机方向、温升和波形变化后再逐步调整。
▸ 示例
P0=0.0、P1=1.0、P2=0.0、P3=0.0:以Vq=1.0 V、零机械速度和0 deg初始电角度启动开环电压调试。
2.6 启动磁极校准
“启动磁极校准”用于启动绝对值编码器磁极校准流程。执行后,设备会按所选模式驱动电机完成校准。
▸ 参数
P0:校准模式,0表示直接检出,1表示双向拟合。P1:对齐电流,类型为float,单位为A。P2:扫描电流,类型为float,单位为A。
▸ 说明
该指令会驱动电机进入校准流程。执行前应确认设备处于允许校准的工装或安全状态,且校准电流符合当前产品规格。
▸ 示例
P0=0、P1=1.0、P2=1.0:以直接检出模式启动磁极校准,对齐电流和扫描电流均设置为1.0 A。
2.7 信号发生控制
“信号发生控制”用于对指定控制目标注入正弦或扫频信号。执行后,设备会按目标类型和信号模式生成测试信号。
▸ 参数
P0:目标选择,0表示停止,1表示位置目标,2表示速度目标,3为电流目标预留但当前未接入,4表示 MIT 位置目标,5表示 MIT 前馈力矩。P1:信号模式,0表示正弦,1表示对数扫频,2表示线性扫频,3为跟踪测试预留但当前未实现。P2:频率,类型为float,单位为Hz。P3:幅值,类型为float,单位随目标类型变化。
▸ 说明
当 P0=0 时,设备停止当前信号发生器。选择位置、速度或 MIT 目标时,应先确认设备处于对应可控状态;当 P0=4 或 P0=5 时,设备需要先进入 MIT 模式,否则会拒绝 MIT 信号发生请求。
▸ 提示
信号发生会持续改变所选目标,首次调试应使用较小幅值,并确认运动范围安全。
▸ 示例
P0=0:停止当前信号发生器。P0=1、P1=0、P2=0.5、P3=0.02:对位置目标注入0.5 Hz的小幅正弦信号。
2.8 ARF Removed
“ARF Removed”是保留的废弃调试入口。执行后,设备只会提示该命令已移除。
▸ 参数
该指令无需填写参数。
▸ 说明
该指令不会启动新的控制功能,日志只会提示纹波补偿已改由电流环内部处理。它仅用于兼容旧上位机布局或旧命令列表。
▸ 提示
不建议将该指令作为客户调试流程使用。
▸ 示例
- 不填写任何参数,若误触发该命令,日志会提示该调试命令已移除。
2.9 故障读取清除
“故障读取清除”用于读取故障信息或清除当前触发故障、缓存故障。执行后,设备会按读取模式返回故障信息,并按清除模式处理故障记录。
▸ 参数
P0:读取模式,0表示读取缓存故障 FIFO,1表示读取当前运行态故障,其他值表示读取当前保护输出。P1:清除模式,0表示不清除,1表示只清除当前触发故障,2表示清除当前触发故障和缓存故障。
▸ 说明
清除模式只处理当前触发故障或缓存故障记录,不代表故障原因已经消失。若设备再次进入故障状态,应根据日志和故障信息继续排查。
▸ 提示
现场排查时建议先使用 P1=0 读取并记录故障信息,再根据需要执行清除。
▸ 示例
P0=1、P1=0:只读取当前运行态故障,不清除。P0=0、P1=2:读取缓存故障 FIFO,并清除当前触发故障和缓存故障。
2.10 抱闸控制
“抱闸控制”用于手动控制抱闸状态。执行后,设备会按参数执行抱闸或解除抱闸。
▸ 参数
P0=0:抱闸。P0=1:解除抱闸。
▸ 说明
设备会检查是否允许手动控制抱闸。若当前状态不满足条件,命令会被拒绝并提示需要伺服失能且无故障。
▸ 提示
解除抱闸前请确认机构支撑可靠,避免负载下落或误动作。
▸ 示例
P0=0:执行抱闸。P0=1:解除抱闸。
2.11 摆臂测试
“摆臂测试”用于启动或停止设备内置的摆臂测试任务。执行后,设备会按参数控制测试任务启停。
▸ 参数
P0=0:停止摆臂测试任务。P0=1:启动摆臂测试任务。
▸ 说明
该指令不做权限门禁,执行后会控制 10 ms 测试任务启停。仅建议在明确测试条件和运动范围的情况下使用。
▸ 提示
启动前应确认测试工装、负载和运动空间满足摆臂测试要求。
▸ 示例
P0=1:启动摆臂测试任务。P0=0:停止摆臂测试任务。
2.12 KTH7112标定
“KTH7112标定”用于进入或退出 KTH7112 标定模式。执行后,设备会按参数切换标定状态。
▸ 参数
P0=0:退出标定模式。P0=1:进入标定模式。
▸ 说明
该指令仅在设备启用 KTH7112 编码器后出现在命令列表中。进入标定模式后,设备会关闭 SPI 读取;退出标定模式后,通常需要断电重启使标定生效。
▸ 示例
P0=1:进入 KTH7112 标定模式。P0=0:退出 KTH7112 标定模式,并按要求断电重启。
2.13 MIT目标设定
“MIT目标设定”用于直接下发 MIT 模式目标。执行后,设备会按位置、速度、刚度、阻尼和前馈力矩更新 MIT 控制目标。
▸ 参数
P0:目标角度,类型为float,单位为deg。P1:目标速度,类型为float,单位为rad/s。P2:kp,类型为float,单位为Nm/rad。P3:kd,类型为float,单位为Nm*s/rad。P4:前馈力矩tau_ff,类型为float,单位为Nm。
▸ 说明
执行时,设备会检查故障状态,并在伺服关闭时尝试自动使能。kp 和 kd 必须大于等于 0;若设备处于故障状态,命令会被拒绝,应先清除故障或复位。
▸ 示例
P0=0.0、P1=0.0、P2=2.0、P3=0.2、P4=0.0:下发零位置、零速度、小刚度和小阻尼的 MIT 目标。